
In the past battlefields were specific, strategically chosen locations. With the exception of ambushes, wars of the past have a sense of locality about them. On the contrary, today’s armed forces no longer have that luxury. The battle can easily start in
tropical jungles, move towards an urban attack on a city and might end with an ICBM (Intercontinental Ballistic Missile) attack from space. While definitely a frightening scenario, the truth is that battle lines no longer exist and conflicts may erupt at any place and time.
In order to deal with such scenarios, the armed forces of countries all around the world are always on the highest alert, on the lookout for a missile launch or for troop movements. Furthermore, all these various possible scenarios require a lot of training for the soldiers before they can be sent to war. The training period lasts from at least a couple of months to several years, depending on a variety of factors. Additionally, an enormous financial budget is required for the training of all these soldiers, as well as for maintaining their alertness and battle readiness. However, what if technology were to play a more mainstream role in direct combat? That seems to be the general direction that armed forces all around the world seem to be heading towards.
The idea of using robots in war is not a radically new one and various militaries around the world have begun the widespread adoption of robots along front lines. Today, we have drones that are piloted remotely and are capable of taking out targets. There is also heavy on-going research to make the drones more autonomous, thus reducing the requirement on humans. There are also legged robots in development that can aid and assist soldiers in moving their equipment and luggage from place to place, and is resilient to various land texture and features.
Although billions of dollars each year are spent on military robotics research, there are still few mass produced military robots being used in the real world. The following is a list of the most well known:
PackBot
Designed by iRobot
PackBot has been designed to easily climbs stairs, rolls over rubble and navigates narrow, twisting passages. The robot’s patented mobility platform features dual QuickFlip™ track articulations. These ‘flippers’ are capable of continuous 360-degree rotation and enable PackBot to traverse rocks, mud, snow, gravel and other tough terrain.

PackBot is a series of small tracked robots developed for the Military by the iRobot Corporation. According to iRobot, More than 3,000 PackBot robots have been delivered worldwide.
PackBot has been designed to easily climbs stairs, rolls over rubble and navigates narrow, twisting passages. The robot’s patented mobility platform features dual QuickFlip™ track articulations. These ‘flippers’ are capable of continuous 360-degree rotation and enable PackBot to traverse rocks, mud, snow, gravel and other tough terrain. PackBot’s flexible polymer tracks eject debris and move the robot over all surfaces with sure-footed efficiency. PackBot even climbs grades up to 60 degrees. PackBot 510 is 30 percent faster, capable of travelling at speeds of up to 5.8 miles per hour (9.3 km/h).
PackBot’s shock-resistant chassis can survive shocks of up to 400 Gs. This tough robot can withstand a six-foot drop (1.8 m) onto concrete, being thrown through a window, tumbling down stairs and being deployed from a low-altitude helicopter. PackBot is fully sealed, with no exposed wires, making the robot operational in all weather conditions. PackBot can also withstand submersion in 6 feet (1.8 m) of water.

PackBot offers multi-mission flexibility and customisation options on a proven chassis. State-of-the-art electronics enhance payload integration capabilities. Each of the eight payload ports is equipped with Ethernet, USB, power and two video channels. As a result, there is no limit to the types of payloads the robot can support. Interchangeable, modular payloads enable the robot to perform a wide variety of missions.
PackBot can be hand carried and deployed by one person in less than two minutes. No expensive, specialised equipment or vehicles are necessary; PackBot can be easily loaded into a MOLLE pack, the trunk of a car or a helicopter. Once deployed, the robot can quickly penetrate collapsed buildings, sewers, tunnels, airplane aisles, railroad cars and other areas that are inaccessible or dangerous.
The robot relays real-time video, audio and other sensor readings while the operator stays at a safe standoff distance. The operator can view a 2-D or 3-D image of the robot on the control unit, allowing for precise positioning. The control unit is battery-powered and can also be used with a supplementary power supply. PackBot 510 also features a game-style hand controller for faster training and easier operation in the field.
BigDog
Designed by Boston Dynamics
BigDog is a legged robot under development of Boston Dynamics, with funding from DARPA. Their goal is to build unmanned legged vehicles with rough-terrain mobility superior to existing wheeled and tracked vehicles. The idea system would travel anywhere a person or animal could go using their legs, run for many hours at a time, and carry its own fuel and payload.

BigDog is a legged robot under development of BostonDynamics, with funding from DARPA. Their goal is to build unmanned legged vehicles with rough-terrain mobility superior to existing wheeled and tracked vehicles. The idea system would travel anywhere a person or animal could go using their legs, run for many hours at a time, and carry its own fuel and payload. It would be smart enough to adapt its posture and behaviour according to the terrain with minimum human guidance and intervention. The BigDog robots have taken steps toward these goals, though there remains a great deal of work to be done.

BigDog has on-board systems that provide power, actuation, sensing, controls and communications. The power supply is a water-cooled two-stroke internal combustion engine that delivers about 15 hp. The engine drives a hydraulic pump which delivers high-pressure hydraulic oil through a system of filters, manifolds, accumulators and other plumbing to the robot’s leg actuators. The actuators are low-friction hydraulic cylinders regulated by two-stage aerospace-quality servo valves. Each actuator has sensors for joint position and force. Each leg has 4 hydraulic actuators that power the joints, as well as a 5th passive degree of freedom. A heat-exchanger mounted on BigDog’s body cools the BigDog’s on-board computer controls locomotion, servos the legs and handles a variety of sensors. BigDog’s control system keeps it balanced, navigates, and regulates its energetics as conditions vary. Sensors for locomotion include joint position, joint force, ground contact, ground load, a gyroscope, LIDAR and a stereo vision system. Other sensors focus on the internal state of BigDog, monitoring the hydraulic pressure, oil temperature, engine functions, battery charge and others.
BigDog weighs about 109 kg, is about 1 meter tall, 1.1 meters long, and 0.3 meters wide. In separate tests BigDog runs at 6.5 kilometres per hour and climbs slopes up to 35 degrees. It is able to walk across rubble, climb a muddy hiking trail, walk in snow and water, and is able to carry a 155 kg load. BigDog set a world’s record for legged vehicles by travelling 20.5 kilometres without stopping or refuelling.
BigDog is usually driven by a human operator who works through an operator control unit (OCU) that communicates with the robot via IP radios. The operator uses the OCU to provide steering and speed input in order to guide the robot along its path and to control the speed of travel. The operator can also tell the robot to start or stop its engine, stand up, squat down, walk, trot, or jog. A visual display provides the operator operational and engineering data. The operator is responsible for directing the robot while BigDog’s on-board control system operates the legs, provides stability on rough terrain, and reflexes responses to external disturbances.
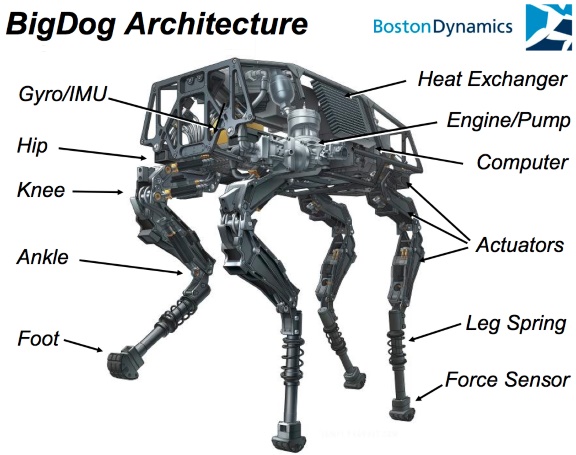
Illustration showing BigDog’s major components
BigDog is equipped with a stereo vision system and a LIDAR. The stereo vision system was developed by the Jet Propulsion Laboratory. It consists of a pair of stereo cameras, a computer and vision software. The stereo system can be used to acquire the shape of the 3D terrain just in front of the robot, and also to find a clear path forward. The LIDAR is being used to allow BigDog to follow a human leader, without requiring the operator to drive continuously.
BigDog’s control system coordinates the kinematics and ground reaction forces of the robot while responding to basic postural commands. The control distributes load amongst the legs to optimize their load carrying ability. The vertical loading across the limbs is kept as equal as possible while individual legs are encouraged to generate ground reactions directed toward the hips, thus lowering required joint torques and actuator efforts.
The control system adapts to terrain changes through terrain sensing and posture control. By using joint sensor information it determines when feet are in contact with the ground and it also determines the desired load on each leg and actuator. A posture algorithm controls body position by coordinating the kinematics of the legs with the reaction forces of legs in contact with the ground. The posture algorithm implements computed leg compliance on uneven terrain. This approach allows control of body roll, pitch, and height relative to the ground, thereby allowing BigDog to adapt to local terrain variations without higher-level terrain sensing.
BigDog adapts to the terrain in two ways. It adjusts body height and attitude to conform to the local terrain, and it adjusts footfall placement to compensate for orientation of the robot body and ground plane relative to gravity.
The developers are working on it’s improvements in order to make it more autonomous, quiet and be able to walk on even rougher terrain.